Marine Robotics
BlueBuzz Acoustic Modem
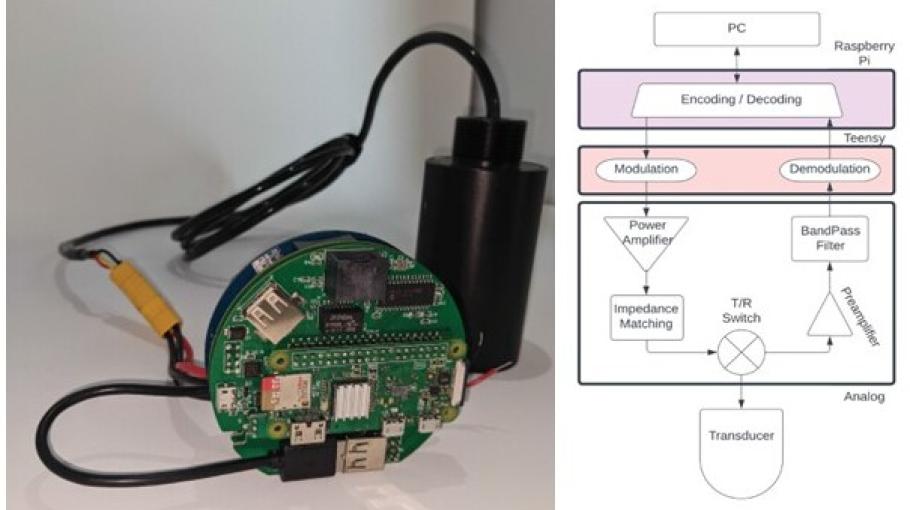
Group-in-charge: Prof. Fumin Zhang
Aquatic-based research is gaining increasing attention from the computing and engineering research communities, but specialized facilities, equipment, and training make entry into this field challenging. The high costs of performing aquatic research make shared infrastructure an attractive solution for improving global research efforts. In aquatic-based research, underwater communication is highly valued, with researchers typically using acoustic modems. Unfortunately, these systems are generally high-cost and blackbox, limiting the abilities of researchers. Our proposed solution to these limitations is the BlueBuzz, an open-source acoustic modem that is easily integrated into different platforms, reconfigurable, and experimentally verified. This work's primary contributions are: i) an open-source acoustic modem that uses frequency hopping frequency shift keying (FHFSK) to achieve 250 bps at 0.5% BER in an Olympic-sized pool; ii) interoperable design allowing for interfacing with a multitude of pre-existing systems and iii) built on common SOC (Raspberry Pi Zero W) and MCU (Teensy 4.0) with large support communities to minimize initial expertise.
Glider-Environment Networked Information Operating System
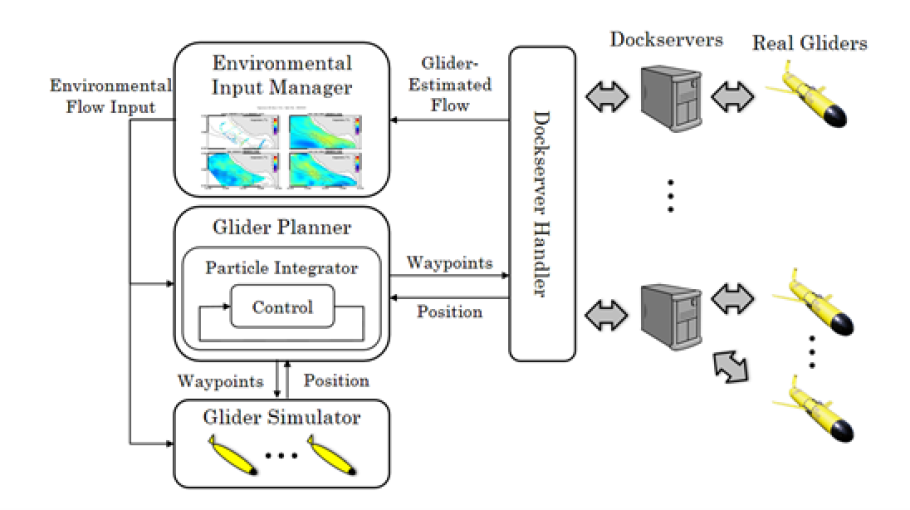
Group-in-charge: Prof. Fumin Zhang
To support autonomous glider navigation, the Glider Coordinated Control System (GCCS) was developed for generating waypoints for gliders. We developed the Environment input manager to interface Glider-Environment Networked Information Operating System (GENIoS) with multiple measured/simulated oceanic data in real-time, including Wave Radar, High-Frequency Radar, and various ocean models. We also implemented data assimilation techniques to generate more realistic environment state estimation and prediction. To ensure autonomous glider operation, we incorporated the Dock server handler interface into GENIoS for fast acquisition of surfacing information and seamless waypoint updates. Real-time visualization is also provided to make GENIoS decision-making explainable to human operators. Over the last ten years, we not only achieve efficient and stable data transmission and glider control, but also supported many glider deployments in multiple regions, such as Long bay, Cape Hatteras, and Gray’s Reef in the United States.
Indoor Miniature Autonomous Blimps

Group-in-charge: Prof. Fumin Zhang
The use of indoor aerial robots is gaining popularity due to their potential applications in areas such as surveillance, building exploration, human-robot interaction, and search and rescue. However, the use of such robots requires a significant amount of energy. A less energy consumption option is the use of Miniature Autonomous Blimps. These blimps offer several advantages over UAVs, such as being inherently safe and energy efficient, with longer battery life. In addition, miniature blimps could be a friendly and useful tool for specific environments, particularly for indoor interaction with people. They are stable, non-threatening, and could be effective at detecting and following individuals. We modeled the 6-DOF motion and determined the parameters of the MAB related to the 3-DOF motion in the vertical plane. And we built a flight controller to make the GT-MAB with constant forward and lateral velocities and reduce oscillations. MAB also serves as our simulation experiment platform to test the feasibility and stability of the latest developed algorithms, such as multi-robot systems, path planning algorithms, robot vision, etc.
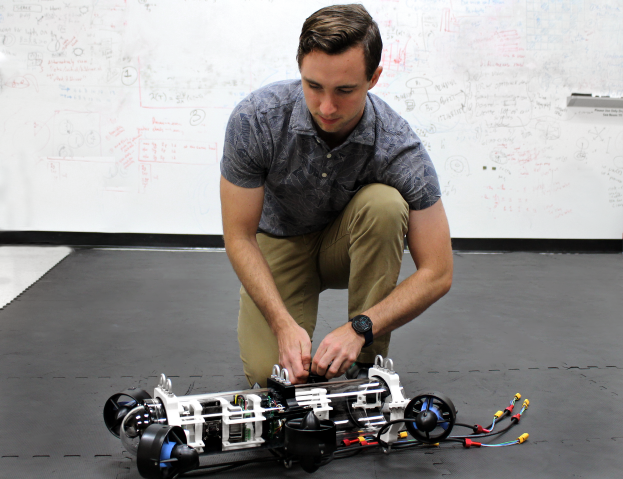
Miniature Underwater Robot (MUR)
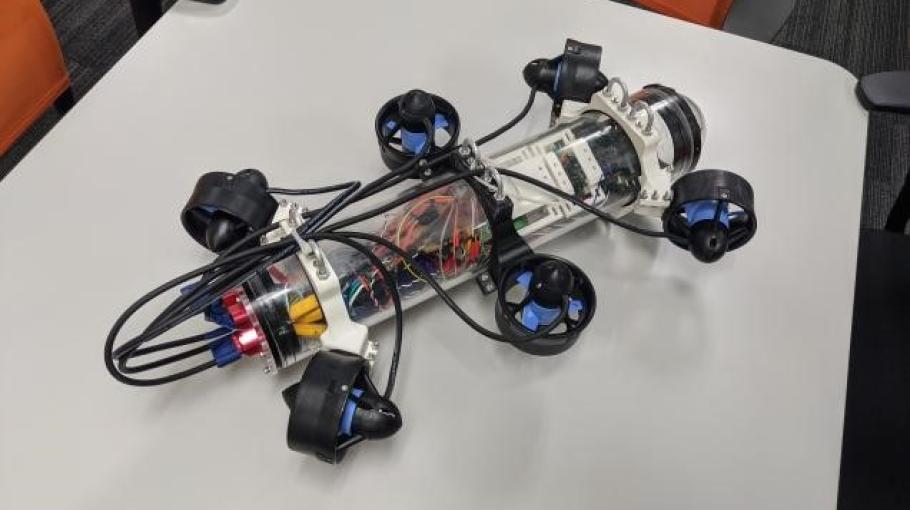
The MUR is an underwater robot equipped with a suite of sensors and hardware capable of tackling difficult research tasks. The MUR comes with a 5-camera system with an onboard computer running ROS for camera vision, machine learning, and computation. A suite of sensors including GPS, 2xIMUs, pressure, and temperature sensors allow researchers to measure their environment and perform localization (optional sensor ports allow for adding 3rd-party sensors). For communication, the MUR interfaces with the BlueBuzz acoustic modem for underwater acoustic communication. An optional radio slot also allows shore-to-MUR communication when the MUR is surfaced and acts as a GPS location broadcaster. The MUR also supports tethered ethernet and Wi-Fi (when surfaced) for direct VPN connections. The MUR is fully open source, both hardware and software, allowing future researchers to modify the robot in any way that meets their needs. The MUR platform is the future of underwater academic research.
Group-in-charge: Prof. Fumin Zhang
Ocean-related technologies, especially the infrastructure for observing and exploring the aquatic domain, are critical to the world’s economy. In recent decades, autonomous underwater vehicles (AUVs) have emerged as effective tools to collect samples in oceans, lakes, and estuaries for various underwater applications [1-4]. The next research frontier is to 1) use fleets of aquatic robots to perform distributed sampling in aquatic environments, 2) tracking marine life to understand the life cycles of sharks, jellyfish, lobsters, monitoring and tracking fast-evolving plumes, algae, or other dynamic features and 3) perform search and rescue or other dense sampling missions enabled by the drastically decreasing costs of individual aquatic robots. To enable these research targets, a low-cost, highly capable, and flexible robot is required. Our miniature underwater robot (MUR) is that robot.