ROBOTIC MANIPULATION
Dexterous Manipulation of Thin Deformable Objects
Paper 1: Chunli, Jiang & Abdullah, Nazir & Ghasem, Abbasnejad & Jungwon, SEO. Dynamic Flex-and-Flip Manipulation of Deformable Linear Objects. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE.
Website 1: https://github.com/HKUST-RML/flexflip
Paper 2: Chao, Zhao* & Chunli, Jiang* & Junhao, Cai & Hongyu, Yu & Michael Yu, Wang& Qifeng, Chen. Flipbot: Learn Continuous Paper Flipping via Coarse-to-Fine Exteroceptive-Proprioceptive Exploration. 2023 IEEE International Conference on Robotics and Automation (ICRA), IEEE.
Website 2: https://robotll.github.io/Flipbot/
Group-in-charge: Prof. Hongyu YU
Focus Area: Robotic Manipulation
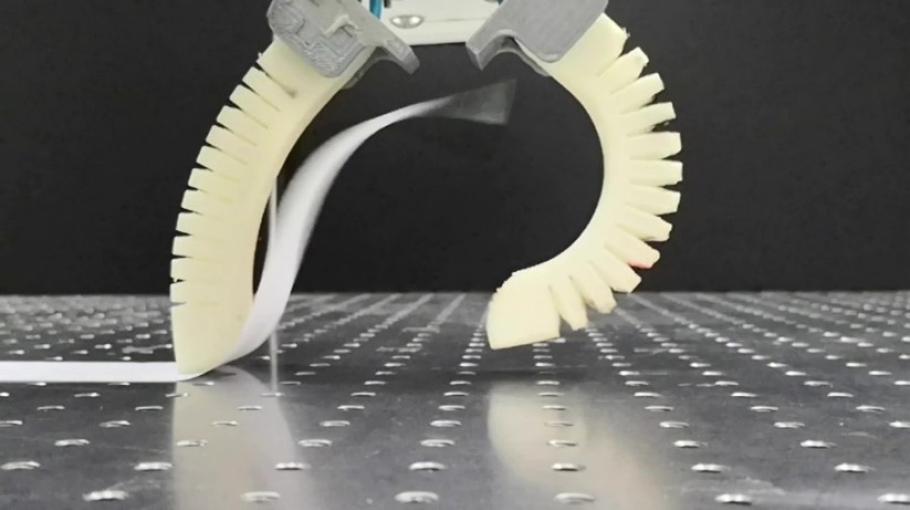
A novel solution, Flipbot, for singulating and grasping thin and flexible deformable objects that utilize the cross-sensory encoding of exteroceptive and proprioceptive perceptions. Meanwhile, the system takes advantage of the underactuation and compliance of the soft pneumatic actuator to control contact forces precisely for the singulation of a thin layer of deformable objects. We deploy the algorithm on a real-robot system and show that embodied learning can effectively facilitate deformable object manipulation. In particular, the system achieves extremely high success rate of book page by page turning.

Learn to Grasp via Intention Discovery
Group-in-charge: Prof. Hongyu YU, Prof. Qifeng Chen
Focus Area: Robotic Manipulation
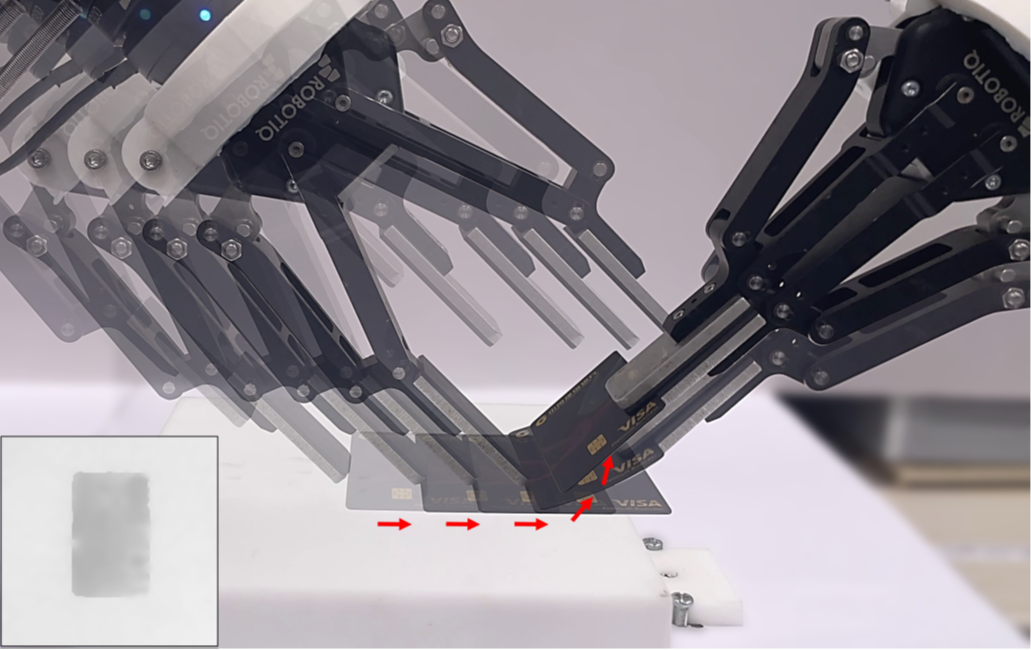
Inspired by the human learning process, we propose a method to extract and exploit latent intents from demonstrations, and then learn diverse and robust grasping policies through selfexploration. The resulting policy can grasp challenging objects in various environments with an off-the-shelf parallel gripper. The key component is a learned intention estimator, which maps gripper pose and visual sensory to a set of sub-intents covering important phases of the grasping movement. Subintents can be used to build an intrinsic reward to guide policy learning. The learned policy demonstrates remarkable zero-shot generalization from simulation to the real world while retaining its robustness against states that have never been encountered during training, novel objects such as protractors and user manuals, and environments such as the cluttered conveyor.
Paper: Zhao, Chao & Chunli Jiang & Junhao Cai& Hongyu Yu& Michael Yu Wang & Qifeng Chen. Learn to Grasp Via Intention Discovery and Its Application to Challenging Clutter. IEEE Robotics and Automation Letters 8, no. 2 (2022): 488-495.