
Smart Manufacturing
Robotic Manipulation — Representation And Optimization

As humans, robots can use various types of sensing, even some not present in humans, such as distance measuring sensors. One of the challenges has been to develop control and decision-making algorithms that can in an optimal manner use information from several sensory modalities and also do this in real time. As such, given various sensory data, we will in RoMRO explore geometrical and topological tools to facilitate the design of effective representations, which will enable the robots to better understand the task and the problem, and in turn to boost the optimization of their planning and executions. In particular, we will focus on developing representations that allow us to exploit the geometrical variances among the encountered particular problems to make the system adaptive, and also to capture the topological invariances to be used for understanding higher-level semantics that better generalize over problems.
Underwater Robots
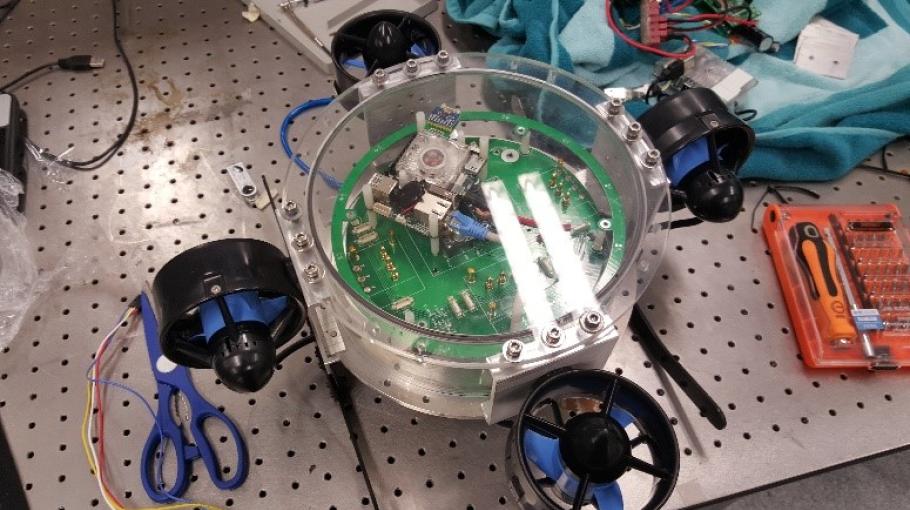
Nowadays technology governing an underwater field has emerged, resulting in sophisticated underwater robots. However, most of the control algorithms need feedback from expensive sensory such as DVL(Doppler Velocity Log) and Sonar are not applicable for small size observation class underwater robot for commercial use. In this research, robust control algorithm will be investigated that will use low-cost sensors available in the market such as low cost IMU (Inertial Measurement Unit), cameras, pressure sensor, and ultrasonic sensor. The main challenge of this project will be the modelling of an underwater robot platform and designing appropriate control algorithm with the aforementioned sensor. All of the sensors used will be relatively low-cost sensor so an appropriate sensor fusion technique need to be implemented to provide a reliable state estimation data for the control algorithm to stabilize the platform. Through this project, real-world application can be seen directly as a diving assistant where the robot can assist the diver when they are performing certain task, the robot can maintain its position while providing constant video, lighting and give additional safety feature for the diver.
Intelligent Transportation Robot
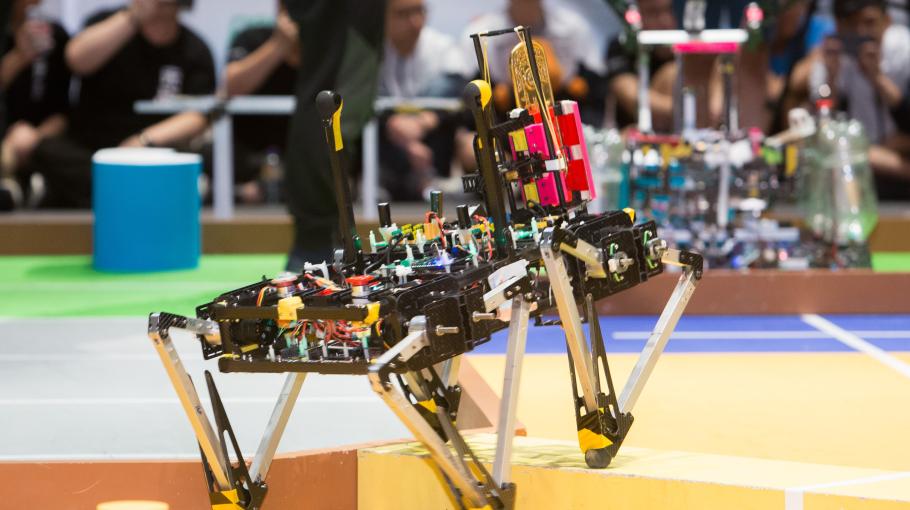
Our research project focuses on the design and development of a portable and intelligent transportation robot. The robot follows an integrated architecture: from the mechanical to the motor design, from the circuit to the control algorithm implementation.
The intelligence makes the robot more than just a transportation tool. It could avoid the obstacle by proximity sensor and detect the ramp by inertial devices. To ensure safety, the robot autonomously adjusts the speed and limits the acceleration, and it could also timely brake upon incident. A camera is placed in the front of the robot to record videos, and to recognize and follow the user. We are also developing the mobile application for the robot, which displays the robot status and location, and allows more interactions with the robot and other users.
Passive Robot System
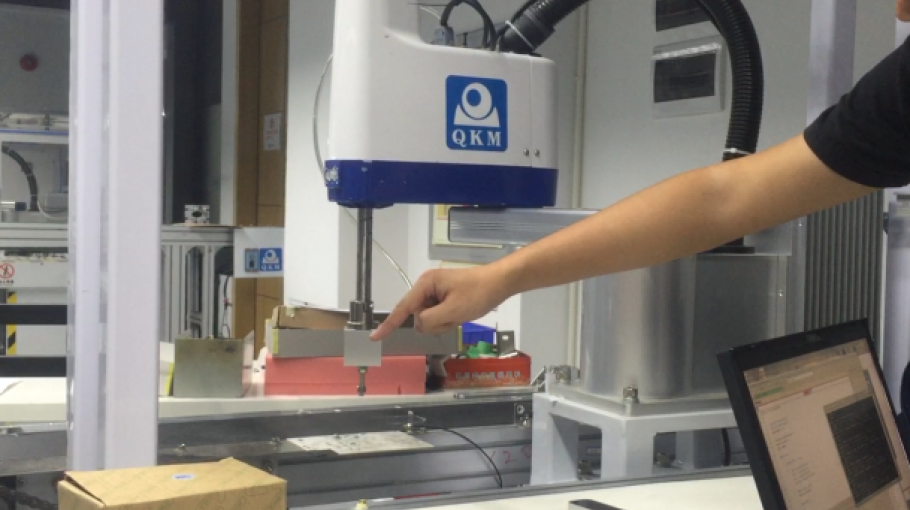
This project uses 3D vision sensor to catch the finger position of an operator. Robot controller uses this position information to lead the end-effector to an expected position.
Then, the operator can record the end-effector position as a teaching position to finish the teaching task. At the same time, a robot simulator running on the PC can help the operator to watch the robot status. This project can reduce the work time and workload of the robot teaching task.
Students in charge: Shengyi NIE