香港科技大學與廈門大學聯合開展珊瑚礁環境水下機器人試驗:聚焦多學科關鍵技術,助力珊瑚礁生態保護


2025年5月15日-23日,香港科技大學鄭家純機器人研究院張福民教授自如機器人實驗室團隊攜手廈門大學童峰教授聲傳輸與信息感知研究團隊,按照雙方聯合承擔的國家自然科學基金國際(地區)合作項目的工作安排,於廈門大學東山太古海洋觀測與實驗站成功完成了一系列關於水下機器人技術應用於珊瑚礁生態監測與保護的聯合試驗。
此次聯合測試歷時多天,聚焦於珊瑚礁環境水下機器人機械抓取、水下三維視覺建圖與水聲通信,驗證了多項關鍵技術,取得顯著成果。此次跨學科跨區域的團隊合作,同時結合了水下機器人技術和珊瑚礁生態保護需求,旨在推動前沿海洋機器人科技應用於生態環境的長期監測與保護。
以科技應對珊瑚礁生態系統的智能監測挑戰
該項目聚焦珊瑚礁生態系統的智能監測挑戰,旨在研發一套由自主水下機器人構成的“認知移動觀測網絡”。針對珊瑚礁淺海覆雜環境中的動態多徑幹擾、平台資源受限及弱通聯條件,項目創新性地融合水聲通信、協同控制與智能感知技術:通過動態稀疏信道建模與自適應通信機制提升網絡鏈路可靠性;設計AUV群體動態接入與資源調度算法,優化多節點協同觀測效率;最終構建軟硬件集成的實驗網絡,實現珊瑚礁環境參數的原位、實時、立體化采集與分析。
團隊已搭建出實驗型小規模水下機器人平台,具備基本的圖像采集、環境感知與初步三維重建能力,能夠在近岸海域開展初步生態調查。這項技術有望逐步替代傳統潛水方式,提高數據獲取效率和安全性,也為長期、連續的生態監測提供技術支撐。
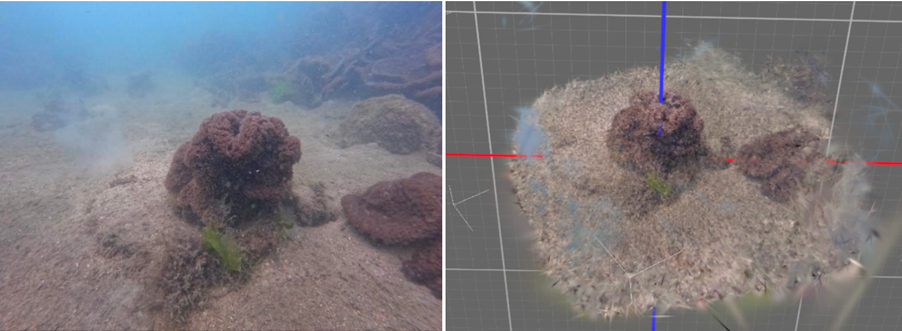
研發團隊此次針對水下環境中視覺幹擾、噪聲影響和狹窄環境約束,開發了改進型水下三維視覺重構算法,通過視覺特征增強、多傳感器融合等方法,有效降低了視距受限、能見度低的環境對建圖效果的影響,並成功實現在珊瑚礁覆雜多變的空間內快速且高精度的三維重構作業。
另外,研究團隊在珊瑚礁區域內開展了面向移動觀測的水聲通信實驗,驗證了水聲通信技術在覆雜水文條件下的可靠性和穩定性。該技術有望有效解決水下觀測平台數據實時傳輸和智能化交互的難題,從而幫助建立面向珊瑚礁生態監測的立體化水下網絡觀測系統。
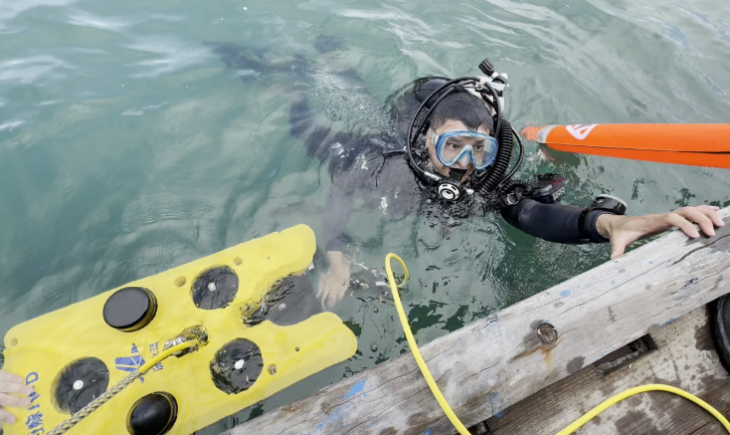
本次實驗中,研究團隊還首次開展了潛水員、水下機器人與自主水下航行器(AUV)的協作模式探索,讓不同平台優勢互補從而高效、安全地實施作業。潛水員通過全方位的現場協作、實時監督與系統指引,實時與水下機器人、AUV之間保持高效通訊,優化整體工作流程並確保作業安全,有效探索人工與自主機器人間協同作業新模式。
多方合作促進跨領域協同創新
香港科技大學張福民教授表示,團隊長期專注於水下智能裝備的研發,此次與廈門大學在生態領域的協作,將進一步拓展技術在實際環境中的應用潛力。
廈門大學團隊也指出:“通過兩校合作,我們嘗試並證實了水下機器人技術與生態保護工作的深度融合具有巨大潛力。未來,我們希望進一步加強跨學科協作,開發更高效、更可靠的技術方案,以期持續有效地保護與恢覆珊瑚礁生態環境。”
此次聯合試驗的成功開展有力推進了水下機器人技術在海洋生態監測與保護領域的應用,並為今後水下智能化作業提供了重要理論支撐和實踐經驗。未來雙方團隊計劃持續深化合作,進一步推動技術創新及海洋生態保護事業向前發展。
作者:蔡金志 編輯:孟吳剛 校對:張惠博