CKSRI's Leadership and Innovations Highlighted at the International Conference on Robotics and Automation (ICRA) 2024


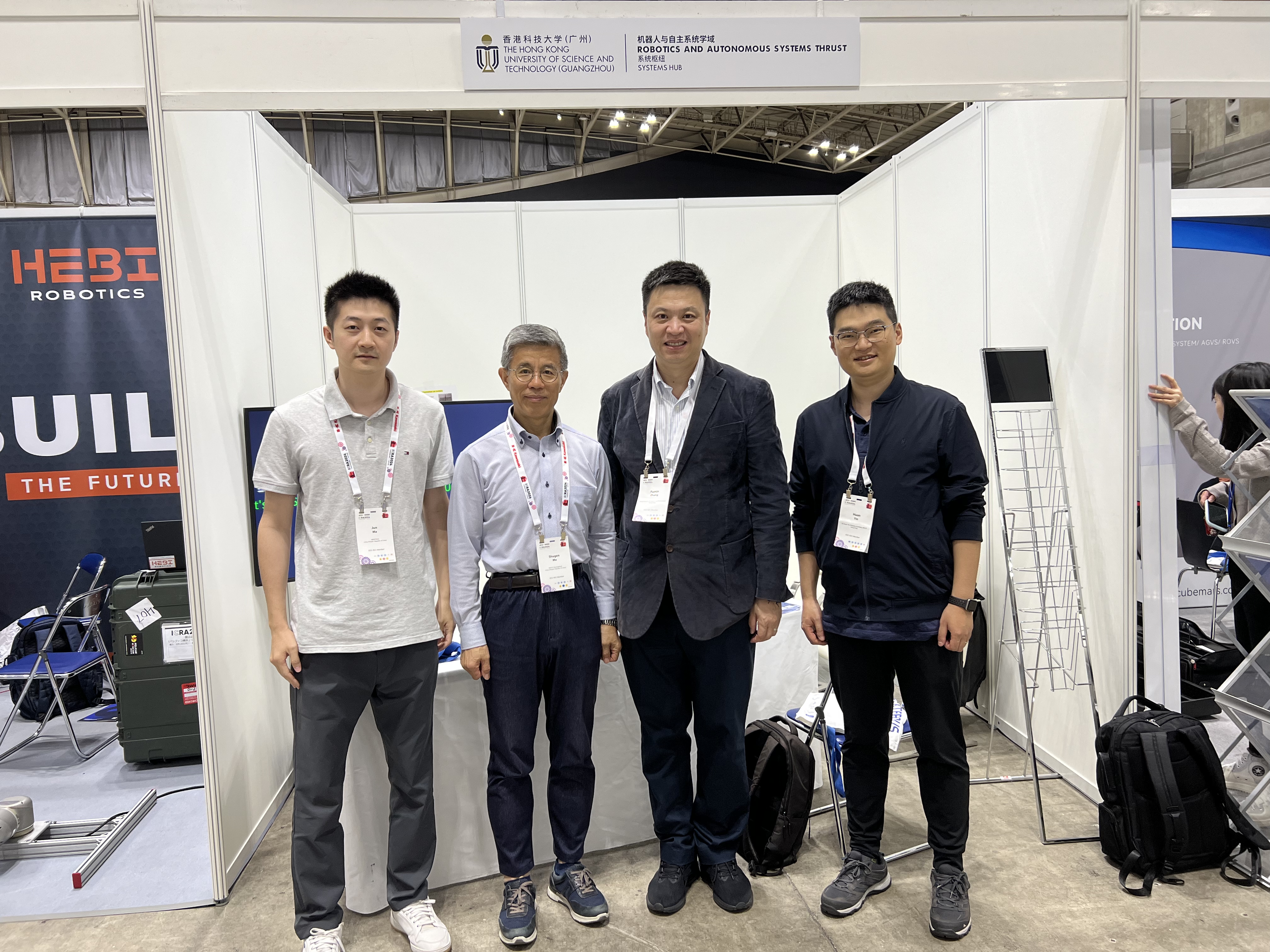
The HKUST Cheng Kar-Shun Robotics Institute (CKSRI) delegation, consisting of esteemed faculty and ambitious students, presented a variety of innovative research projects and papers at the International Conference on Robotics and Automation (ICRA) 2024. Their work covered several facets of robotics, including advancements in artificial intelligence, machine learning applications, and the development of robotic solutions aimed at enhancing sustainability.
Professor Fumin Zhang, Director of CKSRI, shared his thoughts on the institute's participation: "Attending ICRA not only reaffirms our dedication to pushing the boundaries of robotic technology but also allows our students to immerse themselves in the international research landscape. It is immensely gratifying to witness our researchers being acknowledged for their dedication and pioneering contributions."
The conference also served as an excellent opportunity for networking, where CKSRI faculty and students engaged with industry peers, fostering potential collaborative ventures that could lead to future innovations in robotics.
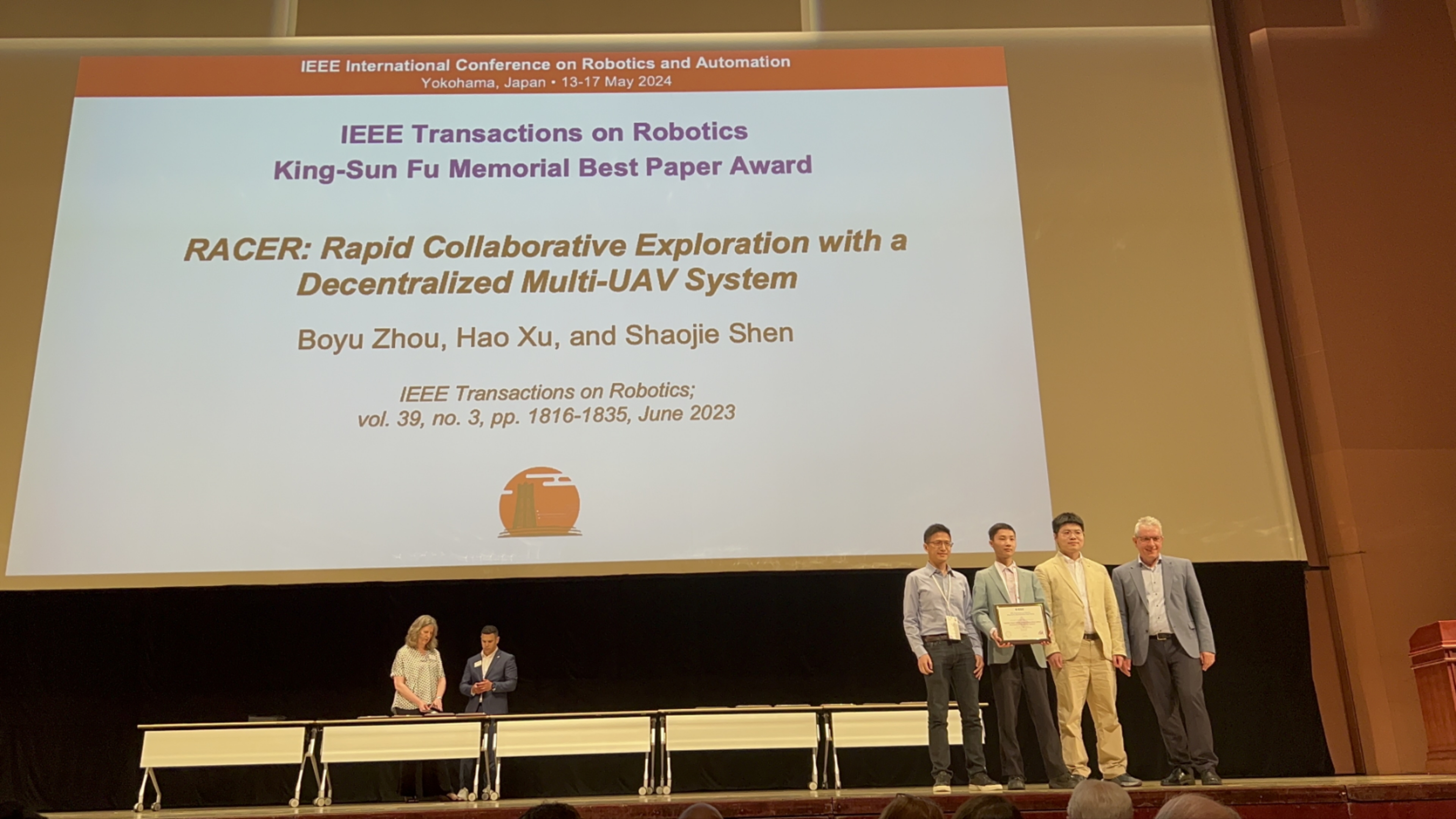
A paper is selected for the 2023 IEEE T-RO Best Paper Award
Boyu Zhou, Hao Xu and Shaojie Shen's paper " RACER: rapid collaborative exploration with a decentralized multi-UAV system" has been chosen for the 2023 IEEE Transactions on Robotics (T-RO) King-Sun Fu Memorial Best Paper Award.

A paper is selected for the 2023 IEEE RA-L Best Paper Award
Chenxing Jiang, Hanwen Zhang, Peize Liu, Zehuan Yu, Hui Cheng, Boyu Zhou and Shaojie Shen's paper " H2-mapping: real-time dense mapping using hierarchical hybrid representation" has been chosen for the IEEE Robotics and Automation Letters (RA-L) Best Paper Award.

A paper is selected as a finalist for the 2024 the IEEE ICRA Best Paper Award
Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Boyu Zhou, Shaojie Shen's paper" FC-planner: a skeleton-guided planning framework for fast aerial coverage of complex 3D scenes" has been chosen as a finalist for the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024) Best Paper Award on Unmanned Aerial Vehicles.

A paper is selected for the ICRA 2024 Radar in Robotics Workshop Best Poster Award
Yang Xu, Qiucan Huang, Shaojie Shen and Huan Yin's work on "Modeling Point Uncertainty in Radar SLAM" has been chosen for the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024) Radar in Robotics Workshop Best Poster Award.

A paper is selected for the ICRA 2024 Future of Construction Workshop Best Research Award
Luqi Wang, Yang Xu and Shaojie Shen's work on "VINS-Multi: a robust asynchronous multi-camera-IMU state estimator" has been chosen for the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024) Future of Construction Workshop Best Research Award.

A paper is selected for the 2024 IEEE International Conference on Robotics and Automation (ICRA)
Zhili Chen, Kien T. Pham, Maosheng Ye, Zhiqiang Shen, and Qifeng Chen's paper "Cross-Cluster Shifting for Efficient and Effective 3D Object Detection in Autonomous Driving" has been accepted for the 2024 IEEE International Conference on Robotics and Automation (ICRA).